
Reinforcement learning is a framework for solving control tasks (also called decision problems) by building agents that learn from the environment by interacting with it through trial and error and receiving rewards (positive or negative) as unique feedback
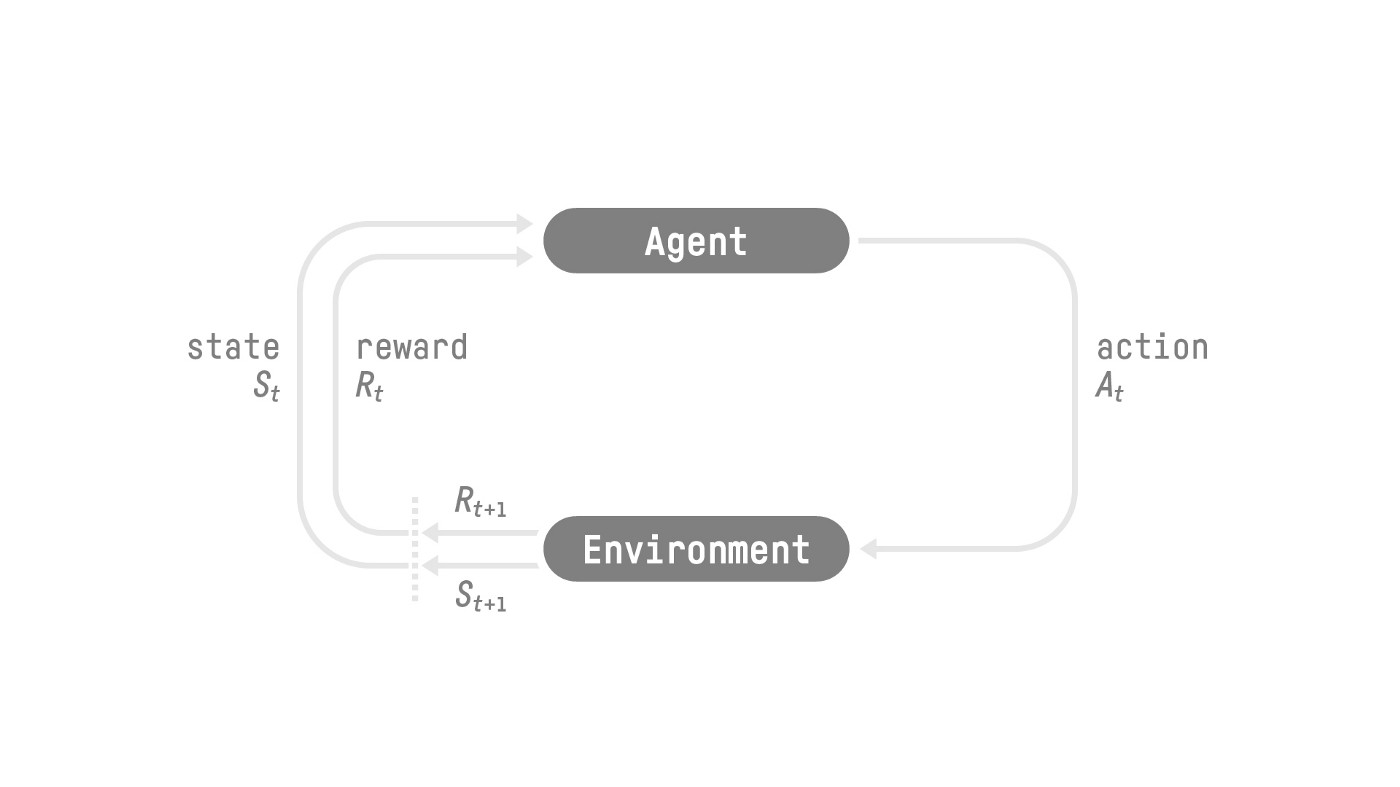
The reinforcement learning problem is meant to be a straightforward framing of the problem of learning from interaction to achieve a goal. The learner and decision-maker is called the agent. The thing it interacts with, comprising everything outside the agent, is called the environment. These interact continually, the agent selecting actions and the environment responding to those actions and presenting new situations to the agent. The environment also gives rise to rewards, special numerical values that the agent tries to maximize over time. A complete specification of an environment defines a task, one instance of the reinforcement learning problem.
More specifically, the agent and environment interact at each of a sequence of discrete timesteps $t = 0, 1, 2, 3, \ldots $ At each timestep $t$, the agent receives some representation of the environment's state $S_t$, and on that basis selects an action $A_t$. One timestep later, in part as a consequence of it's action, the agent receives a numerical reward $R_{t+1}$ and finds itself in a new state $S_{t+1}$.
At each time step, the agent implements a mapping from states to probabilities of selecting each possible action. This mapping is called the agent's policy and is denoted by $\pi_{t}$, where $\pi_{t}(a|s)$ is the probability that the action taken at timestep $t$ is $a$. In other words, $\pi_{t}(a|s)$ is the probability that $A_t = a$ when $S_t = s$. Reinforcement learning methods specify how the agent changes its policy as a result of its experience. The agent’s goal, roughly speaking, is to maximize the total amount of reward it receives over the long run.
This framework is abstract and flexible and can be applied to many different problems in many different ways. For example, the time steps need not refer to fixed intervals of real time; they can refer to arbitrary successive stages of decision-making and acting. The actions can be low-level controls, such as the voltages applied to the motors of a robot arm, or high-level decisions, such as whether or not to have lunch or to go to graduate school. Similarly, the states can take a wide variety of forms. They can be completely determined by low-level sensations, such as direct sensor readings, or they can be more high-level and abstract, such as symbolic descriptions of objects in a room. Some of what makes up a state could be based on memory of past sensations or even be entirely mental or subjective. For example, an agent could be in the state of not being sure where an object is, or of having just been surprised in some clearly defined sense. Similarly, some actions might be totally mental or computational. For example, some actions might control what an agent chooses to think about, or where it focuses its attention. In general, actions can be any decisions we want to learn how to make, and the states can be anything we can know that might be useful in making them.
Reinforcement learning is based on the principle that all goals can be described as the maximization of the expected return (expected cumulative reward).